Экскаватор
ЭТР-253 предназначен
для разработки
траншей шириной 2,1 м
и глубиной 2,5 м
для трубопроводов
диаметром до 1400 мм, производительностью
1200 м3/ч .
В отличие от
экскаваторов серии ЭР-7, в
которых применен
механический привод
основных механизмов, а
гидравлический привод
использован только
для подъема и
опускания рабочего
органа, и экскаватора ЭТР-231, в
котором применен
электрический привод
основных механизмов, в
ЭТР-253 имеются
механический,
гидравлический и
электрический приводы
основных механизмов.
Для транспортного
хода применен
механический привод,
для рабочего хода, а
также для подъема и
опускания рабочего
органа и откидной
части транспортера -
гидравлический привод
и для движения ротора
и транспортера -
электрический привод.
Электрическая энергия
вырабатывается
генератором,
установленном на
экскаваторе.
Тягачом экскаватора
служит трактор ДЭТ-250, в
котором без внесения
изменений в
конструкцию
гусеничного хода и
общей компоновки
механизмов на раме
трактора заменены
следующие механизмы:
1) центральная
фрикционная муфта на
дисковую пружинную;
2) генератор
постоянного тока на
генератор переменного
тока;
3) старый редуктор на
новый раздаточный
редуктор;
4) электродвигатель
хода на редуктор хода.
Кроме того,
дополнительно
установлены редуктор
насосов и карданные
валы для передачи
движения к
раздаточному
редуктору, редуктору
хода и редуктору
насосов. В связи с этим
на раме трактора
приварены новые
кронштейны и
посадочные места.
Главная фрикционная
дисковая муфта
сцепления закреплена
непосредственно на
маховике двигателя
В-30, установленного на
тракторе ДЭТ-250.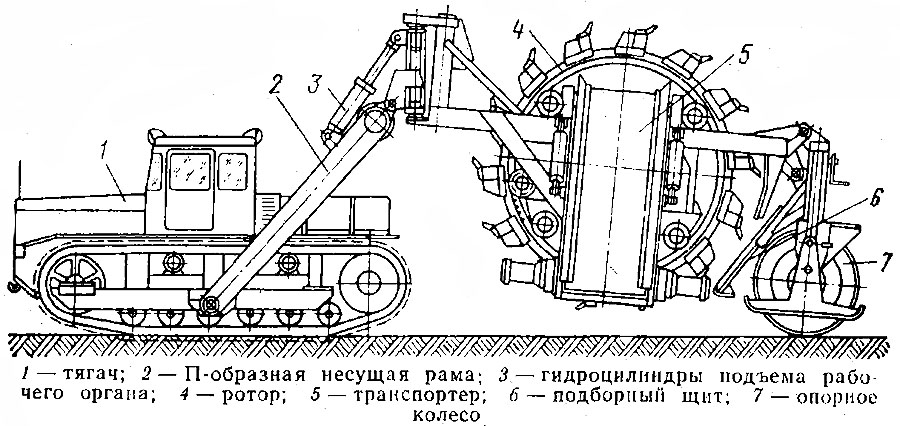
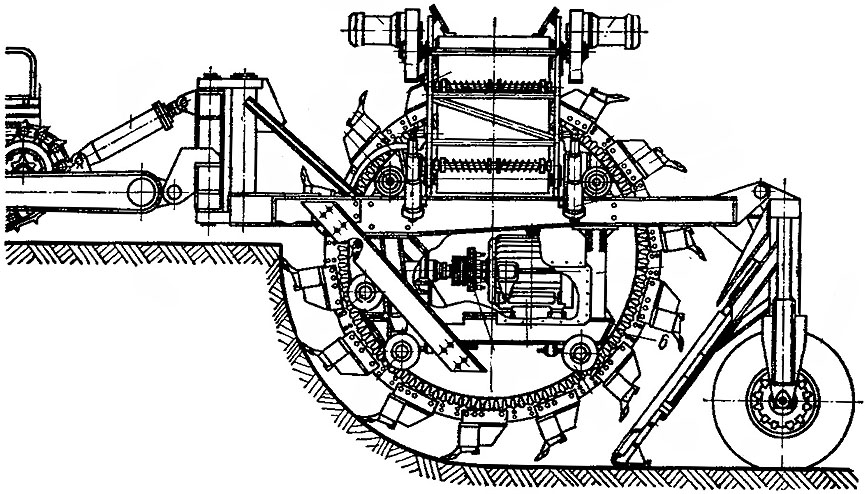
Устройство
рабочего органа
данного экскаватора
принципиально
соответствует
устройству рабочего
органа экскаватора
ЭТР-231. Некоторые
изменения внесены в
конструкции рамы,
механизма подъема
рабочего органа и
задней опоры, привода
и механизма подъема
транспортера. Кроме
того, изменены размеры
валов и осей рабочего
органа, изменены
размеры ротора и
соответственно
изменены размеры
верхней и нижней рам
рабочего органа,
щита-ограничителя и
зачистного щита.
Конструкция редуктора
привода ротора
данного экскаватора
идентична конструкции
такого же редуктора
экскаватора ЭТР-231 и
отличается только
некоторыми
изменениями размеров
валов, шестерен и
подшипников в связи с
установкой
электродвигателя
мощностью 125 кВт и
тем, что между ним и
задним мостом
автомобиля
расположена
компенсационная муфта
(муфта предельного
момента).
При встрече ковшей
ротора с каким-либо
непреодолимым
препятствием редуктор
останавливается, а
ведомые диски
проскальзывают, при
этом не повреждаются
детали редуктора или
электродвигателя.
Конструкция ротора
данного экскаватора
идентична конструкции
ротора ЭР-7АМ. Ротор
катится на четырех
поддерживающих
роликах такой же
конструкции, как у
ЭР-7АМ. Правильность
установки ротора
регулируется четырьмя
направляющими
роликами.
Направляющие ролики
установлены на двух
осях, закрепленных на
нижней раме рабочего
органа.
Для повышения
износоустойчивости
поддерживающие и
направляющие ролики
изготовлены сборными -
ступица из обычной
стали, а наружный
бандаж - из
легированной стали.
На роторе имеется
четырнадцать ковшей.
Откосники ножевого
типа, такие же как у
экскаватора ЭР-7АМ,
установлены на
траверсах,
прикрепленных к
верхней и нижней
рамам.
Складывающийся
транспортер по
конструкции
соответствует
транспортеру
экскаватора ЭТР-231 и
отличается тем, что на
нем установлено
двенадцать
поддерживающих и
четыре спиральных
ролика; кроме того,
ведущий барабан
откидной части
приводится во
вращение двумя, а
ведущий барабан
горизонтальной части -
одним
электродвигателем
мощностью по 18,5 кВт.
Каждый
электродвигатель
имеет одноступенчатый
редуктор для снижения
частоты вращения
ведущего барабана.
Механизм
подъема и опускания
рабочего органа резко
отличается по своей
конструкции от
подобных механизмов
других экскаваторов.
К тягачу прикреплена
прицепная рама из двух
продольных брусьев,
соединенных в одну
жесткую конструкцию
поперечиной и
фланцами. Фланцы между
собой скреплены
болтами. В отверстия
продольных брусьев
вставлены втулки,
имеющие шаровую
наружную поверхность.
Эти втулки надеты на
оси опор,
прикрепленных к
середине лонжеронов
гусеничных тележек
трактора. Шаровая
поверхность втулок
дает возможность
продольным брусьям
иметь некоторую
подвижность
относительно
продольной оси
трактора-тягача.
Задняя часть
прицепной рамы может
подниматься и
опускаться
относительно уровня
земли вокруг осей
опор.
На поперечине имеется
восемь (четыре пары)
кронштейнов,
прикрепленных к
внутренней стороне, и
два кронштейна,
прикрепленных к
наружной стороне.
Шарнирная крестовина
представляет собой
конструкцию,
сваренную из листовой
стали. Втулка
крестовины входит
между кронштейнами
верхней рамы рабочего
органа, с которой
крестовина соединена
вертикальным штырем
так же, как и у
экскаватора ЭТР-231.
На крестовине имеются
четыре пары верхних
кронштейнов и две пары
нижних кронштейнов.
Наружные кронштейны
поперечины входят
между нижними
кронштейнами
шарнирной крестовины.
В отверстия, имеющиеся
в каждом кронштейне,
вставлены
горизонтальные
соединительные
пальцы, которыми
соединяются между
собой тягач и рабочий
орган. При такой
конструкции
соединения тягача о
рабочим органом
нагрузка от
последнего
воспринимается задней
опорой и серединой
гусеницы, т.е.
распределяется
равномерно по всей
длине гусеничного
хода. Это улучшает
проходимость
экскаватора как во
время работы, так и при
передвижении на
транспортном ходу.
Рабочий
орган может
перемещаться
относительно тягача в
вертикальной
плоскости вокруг осей
соединительных
пальцев. Одновременно
он может перемещаться
относительно тягача в
горизонтальной
плоскости вокруг оси
штыря, соединяющего
шарнирную крестовину
с верхней рамой
рабочего органа.
При подъеме задней
части прицепной рамы
(поперечины) вместе с
ней будет подниматься
и передняя часть
рабочего органа
(крестовина). При этом
рабочий орган будет
перемещаться в
вертикальной
плоскости вокруг оси
опорного колеса, а
расстояние между
поперечными осями
тягача и рабочего
органа будет
уменьшаться.
Прицепная рама
одновременно с рамой
рабочего органа будет
перемещаться вокруг
осей пальцев,
соединяющих
кронштейны поперечины
и крестовины.
Чтобы поднять заднюю
часть прицепной рамы и
переднюю часть рамы
рабочего органа, между
кронштейнами
установлены четыре
гидравлических
цилиндра штоками
вверх. Головки
цилиндров закреплены
пальцами между
кронштейнами
поперечины, а штоки
закреплены также
пальцами между
кронштейнами
крестовины.
В рабочем положении,
т.е. при рытье траншеи
на полную глубину (2,5 м),
когда ротор опущен на
максимальную
величину, прицепная
рама тягача находится
в горизонтальном
положении, так же как и
верхняя рама рабочего
органа. Угол между
этими конструкциями
равен 180°. Штоки
полностью входят в
гидравлические
цилиндры.
При подъеме рабочего
органа масло,
нагнетаемое в
цилиндры, заставляет
штоки выходить из них
и давить через пальцы
на верхние кронштейны
крестовины. Последняя
будет пытаться
повернуться вокруг
горизонтальных
пальцев, соединяющих
нижние кронштейны
крестовины с
наружными
кронштейнами
поперечины. Но так как
крестовина жестко
соединена в
горизонтальной
плоскости с
кронштейном верхней
рамы рабочего органа,
то за счет изменения
своего положения она
начинает вращать
верхнюю раму вокруг
горизонтальной оси
колеса задней опоры,
вследствие чего
передний конец рамы
рабочего органа
перемещается вверх.
Одновременно будут
передвигаться вверх
вокруг оси опоры
продольные брусья
прицепной рамы.
Таким образом, при
выходе штоков из
гидравлических
цилиндров все выше
будет подниматься
узел соединения
прицепной рамы с рамой
рабочего органа. Обе
эти конструкции будут
стремиться
«сложиться» вместе, а
угол между ними будет
уменьшаться. При
наибольшем выходе
штоков из
гидравлических
цилиндров подъем
достигнет
максимальной
величины, ротор
полностью выйдет из
траншеи и поднимется
настолько, что
расстояние между
поверхностью земли и
самой нижней его
частью будет равно 300 мм.
При рытье траншеи на
глубину менее 2,5 м
ротор опускается за
счет частичного
выхода штоков из
гидравлических
цилиндров.
Рабочий орган при
рытье траншеи
необходимо опускать
после того, как начнут
работать транспортер
и ротор.
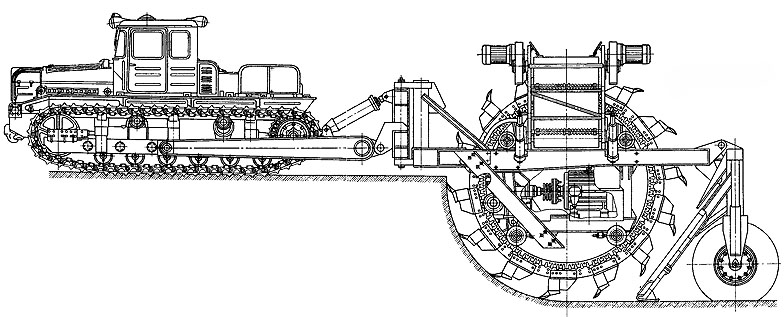
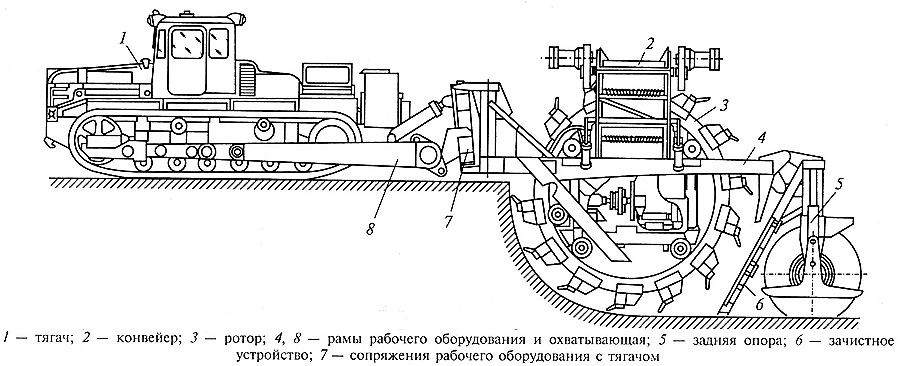
Опытный
образец экскаватора
ЭТР-253 изготовил
Московский
экспериментально-механический
завод (МЭМЗ); серийное
производство
модернизированной
модели ЭТР-253А (схема
ниже) с 1972 г. начал
Брянский завод
дорожных машин.
|